Гироскопы на радиоуправляемых моделях
Назначение гироскопов и устройство датчиков поворота
Гироскопы предназначены для демпфирования угловых перемещений моделей вокруг одной из осей, либо стабилизации их углового перемещения. Применяются в основном на летающих моделях в случаях, когда необходимо повысить стабильность поведения аппарата или создать ее искусственно. Наибольшее применение (около 90%) гироскопы нашли в вертолетах обычной схемы для стабилизации относительно вертикальной оси путем управления шагом рулевого винта. Это обусловлено тем, что вертолет обладает нулевой собственной стабильностью по вертикальной оси. В самолетах гироскоп может стабилизировать крен, курс и тангаж. Курс стабилизируют в основном на турбореактивных моделях для обеспечения безопасного взлета и посадки, - там большие скорости и взлетные дистанции, а ВПП, как правило, узкая. Тангаж стабилизируют на моделях с малой, нулевой, либо отрицательной продольной устойчивостью (с задней центровкой), повышающей их маневренные возможности. Крен полезно стабилизировать даже на учебных моделях.
На самолетах и планерах спортивных классов гироскопы запрещены требованиями FAI.
Гироскоп состоит из датчика угловой скорости и контроллера. Как правило, они конструктивно объединены, хотя на устаревших, а также "крутых" современных гироскопах размешены в разных корпусах.

|

|
По конструкции датчиков вращения, гироскопы можно разделить на два основных класса: механические и пьезо. Точнее, сейчас делить особо уже не на что, потому что механические гироскопы полностью сняты с производства как морально устаревшие. Тем не менее, распишем и их принцип работы тоже, хотя бы ради исторической справедливости.
Основу механического гироскопа составляют тяжелые диски, закрепленные на валу электродвигателя. Двигатель в свою очередь имеет одну степень свободы, т.е. может свободно вращаться вокруг оси, перпендикулярной валу двигателя.
Раскрученные двигателем тяжелые диски обладают гироскопическим эффектом. Когда вся система начинает вращаться вокруг оси, перпендикулярной двум другим, двигатель с дисками отклоняется на определенный угол. Величина этого угла пропорциональна скорости поворота (те, кто интересуется силами, возникающими в гироскопах, могут поглубже ознакомиться с кориолисовым ускорением в специальной литературе). Отклонение мотора фиксируется датчиком, сигнал которого поступает на блок электронной обработки данных.
Развитие современных технологий позволило разработать более совершенные датчики угловых скоростей. В результате появились пьезогироскопы, которые к настоящему времени полностью вытеснили механические. Конечно, они по-прежнему используют эффект кориолисова ускорения, но датчики являются твердотельными, то есть вращающиеся части отсутствуют. В наиболее распространенных датчиках используются вибрирующие пластины. Поворачиваясь вокруг оси, такая пластина начинает отклоняться в плоскости, поперечной плоскости вибрации. Это отклонение измеряется и поступает на выход датчика, откуда снимается уже внешней схемой для последующей обработки. Самыми известными производителями подобных датчиков являются фирмы Murata и Tokin.
Пример типичной конструкции пьезоэлектрического датчика угловых скоростей дан на следующем рисунке.
У датчиков подобной конструкции есть недостаток в виде большого температурного дрейфа сигнала (т.е. при изменении температуры на выходе пьезодатчика, находящегося в неподвижном состоянии, может появиться сигнал). Однако достоинства, получаемые взамен, намного перекрывают это неудобство. Пьезогироскопы потребляют намного меньший ток по сравнению с механическими, выдерживают большие перегрузки (менее чувствительны к авариям), позволяют более точно реагировать на повороты моделей. Что касается борьбы с дрейфом, то в дешевых моделях пьезогироскопов есть просто регулировка "нуля", а в более дорогих - автоматическая установка "нуля" микропроцессором при подаче питания и компенсация дрейфа температурными датчиками.
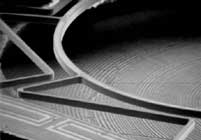
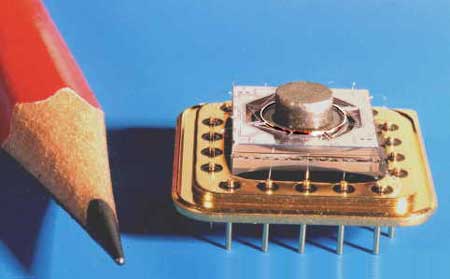
Жизнь, однако, не стоит на месте, и вот уже в новой линейке гироскопов от Futaba (Семейство Gyxxx с системой "AVCS") уже стоят датчики от Silicon Sensing Systems, которые очень выгодно отличаются по характеристикам от продуктов Murata и Tokin. Новые датчики имеют более низкий температурный дрейф, более низкий уровень шумов, очень высокую виброзащищенность и расширенный диапазон рабочих температур. Это достигнуто за счет изменения конструкции чувствительного элемента. Он выполнен в виде кольца, работающего в режиме изгибных колебаний. Кольцо делается методом фотолитографии, как микросхема, поэтому датчик называется SMM (Silicon Micro Machine). Не будем углубляться в технические подробности, любопытные смогут найти все здесь: http://www.spp.co.jp/sssj/comp-e.html. Приведем лишь несколько фотографий самого датчика, датчика без верхней крышки и фрагмента кольцевого пьезоэлемента.

|
|
Типичные гироскопы и алгоритмы их работы
Наиболее известными производителями гироскопов на сегодняшний день являются фирмы Futaba, JR-Graupner, Ikarus, CSM, Robbe, Hobbico и т.д.
Теперь рассмотрим режимы работы, которые используются в большинстве выпускаемых гироскопов (всякие необычные случаи рассмотрим потом отдельно).
Гироскопы со стандартным режимом работы
В этом режиме гироскоп демпфирует угловые перемещения модели. Такой режим достался нам в наследство от механических гироскопов. Первые пьезогироскопы отличались от механических в основном датчиком. Алгоритм работы остался неизменным. Суть его сводится к следующему: гироскоп измеряет скорость поворота и выдает коррекцию к сигналу с передатчика, чтобы замедлить вращение, насколько это возможно. Ниже дается пояснительная блок-схема.
Как видно из рисунка, гироскоп пытается подавить любое вращение, в том числе и то, которое вызвано сигналом с передатчика. Чтобы избежать такого побочного эффекта, желательно на передатчике задействовать дополнительные микшеры, чтобы при отклонение ручки управления от центра, чувствительность гироскопа плавно уменьшалась. Такое микширование может быть уже реализовано внутри контроллеров современных гироскопов (чтобы уточнить, есть оно или нет - посмотрите характеристики устройства и руководство по эксплуатации).
Регулировка чувствительности реализуется несколькими способами:
- Дистанционная регулировка отсутствует. Чувствительность задается на земле (регулятором на корпусе гироскопа) и не меняется во время полета.
- Дискретная регулировка (dual rates gyro). На земле задается два значения чувствительности гироскопа (двумя регуляторами). В воздухе можно выбирать нужное значение чувствительности по каналу регулирования.
- Плавная регулировка. Гироскоп выставляет чувствительность пропорционально сигналу в регулирующем канале.
В настоящее время практически все современные пьезогироскопы имеют плавную регулировку чувствительности (а о механических гироскопах можно уже смело забыть). Исключение составляют только базовые модели некоторых производителей, где чувствительность устанавливается регулятором на корпусе гироскопа. Дискретная регулировка необходима только с примитивными передатчиками (где нет дополнительного пропорционального канала или нельзя выставить длительности импульсов в дискретном канале). В этом случае в канал регулирования гироскопа можно включить небольшой дополнительный модуль, который будет выдавать заданные значения чувствительности в зависимости от положения тумблера дискретного канала передатчика.
Если говорить о достоинствах гироскопов, реализующих только "стандартный" режим работы, то можно отметить, что:
- Такие гироскопы имеют довольно низкую цену (вследствие простоты реализации)
- При установке на хвостовую балку вертолета, новичкам проще выполнять полеты по кругу, так как за балкой можно особенно не следить (балка сама разворачивается по ходу движения вертолета).
Недостатки:
- В недорогих гироскопах термокомпенсация сделана недостаточно хорошо. Необходимо вручную выставлять "ноль", который может сместиться при изменении температуры воздуха.
- Приходится применять дополнительные меры по устранению эффекта подавления гироскопом управляющего сигнала (дополнительное микширование в канале управления чувствительности или увеличение расхода рулевой машинки).
Вот довольно известные примеры описанного типа гироскопов:

|

|

|

|

|

|

При выборе рулевой машинки, которая будет подключаться к гироскопу, следует отдавать предпочтение более быстрым вариантам. Это позволит добиться большей чувствительности, без риска, что в системе возникнут механические автоколебания (когда из-за перерегулирования рули начинают сами двигаться из стороны в сторону).
Гироскопы с режимом удержания направления
В этом режиме стабилизируется угловое положение модели. Для начала маленькая историческая справка. Первой фирмой, которая сделала гироскопы с таким режимом, была CSM. Режим она назвала Heading Hold. Поскольку название было запатентовано, другие фирмы стали придумывать (и патентовать) свои собственные названия. Так возникли марки "3D", "AVSC" (Angular Vector Control System) и другие. Такое многообразие может повергнуть новичка в легкое замешательство, но на самом деле, никаких принципиальных различий в работе таких гироскопов нет.
И еще одно замечание. Все гироскопы, которые имеют режим Heading Hold, поддерживают также и обычный алгоритм работы. В зависимости от выполняемого маневра, можно выбирать тот режим гироскопа, который больше подходит.
Итак, о новом режиме. В нем гироскоп не подавляет вращение, а делает его пропорциональным сигналу с ручки передатчика. Разница очевидна. Модель начинает вращаться именно с той скоростью, с которой нужно, независимо от ветра и других факторов.
Посмотрите блок-схему. По ней видно, что из управляющего канала и сигнала с датчика получается (после сумматора) разностный сигнал ошибки, который подается на интегратор. Интегратор же меняет сигнал на выходе до тех пор, пока сигнал ошибки не будет равен нулю. Через канал чувствительности регулируется постоянная интегрирования, то есть скорость отработки рулевой машинки. Разумеется, вышеприведенные объяснения весьма приблизительны и обладают рядом неточностей, но ведь мы собираемся не делать гироскопы, а применять их. Поэтому нас гораздо больше должны интересовать практические особенности применения подобных устройств.
Достоинства режима Heading Hold очевидны, но хочется особо подчеркнуть плюсы, которые проявляются при установке такого гироскопа на вертолет (для стабилизации хвостовой балки):
- на вертолете начинающий пилот в режиме висения может практически не управлять хвостовым винтом
- отпадает необходимость в микшировании шага хвостового винта с газом, что несколько упрощает предполетную подготовку
- триммирование хвостового винта можно производить без отрыва модели от земли
- становится возможным выполнение таких маневров, которые раньше были затруднены (например, полет хвостом вперед).
Для самолетов применение данного режима тоже может быть оправдано, особенно на некоторых сложных 3D-фигурах вроде "Torque Roll".
Вместе с тем следует отметить, что каждый режим работы имеет свои особенности, поэтому использование Heading Hold везде подряд не является панацеей. При выполнении обычных полетов на вертолете, особенно новичками, использование функции Heading Hold может привести к потере управления. Например, если не управлять хвостовой балкой при выполнении виражей, то вертолет опрокинется.
В качестве примеров гироскопов, которые поддерживают режим Heading Hold, можно привести следующие модели:

|

|

|

|

Переключение между стандартным режимом и Heading Hold производится через канал регулировки чувствительности. Если менять длительность управляющего импульса в одну сторону (от средней точки), то гироскоп будет работать в режиме Heading Hold, а если в другую - то гироскоп перейдет в стандартный режим. Средная точка - когда длительность канального импульса равна примерно 1500 мкс; то есть, если бы мы подключили на этот канал рулевую машинку, то она установилась бы в среднее положение.
Отдельно стоит затронуть тему применяемых рулевых машинок. Для того, чтобы добиться максимального эффекта от Heading Hold, нужно ставить рулевые машинки с повышенной скоростью работы и очень высокой надежностью. При повышении чувствительности (если скорость отработки машинки позволяет), гироскоп начинает перекладывать сервомеханизм очень резко, даже со стуком. Поэтому машинка должна иметь серьезный запас прочности, чтобы долго прослужить и не выйти из строя. Предпочтение стоит отдавать так называемым "цифровым" машинкам. Для самых современных гироскопов разрабатывают даже специализированные цифровые сервомашинки (например, Futaba S9251 для гироскопа GY601). Помните, что на земле, из-за отсутствия обратной связи от датчика вражений, если не принять дополнительных мер, то гироскоп обязательно выведет рулевую машинку в крайнее положение, где она станет испытывать максимальную нагрузку. Поэтому если в гироскоп и рулевую машинку не встроены функции ограничения хода, то рулевая машинка должна уметь выдерживать большие нагрузки, чтобы не выйти из строя еще на земле.
Специализированные самолетные гироскопы
Для применения в самолетах с целью стабилизации крена начали выпускать специализированные гироскопы. От обычных они отличаются тем, что имеют еще один канал внешней команды.

|

|

При управлении каждого элерона отдельным серво, самолетчики с компьютерной аппаратурой задействуют функцию флаперонов. Микширование происходит на передатчике. Однако контроллер самолетного гироскопа на модели автоматически определяет синфазное отклонение обоих каналов элеронов и не мешает ему. А противофазное отклонение задействуется в петле стабилизации крена - в ней присутствуют два сумматора и один датчик угловой скорости. Других отличий нет. Если элероны управляются от одного серво, то специализированный самолетный гироскоп не нужен, сгодится и обычный. Самолетные гироскопы делают фирмы Hobbico, Futaba и другие.
Касаясь применения гироскопов на самолете, нужно отметить, что нельзя использовать режим Heading Hold на взлете и посадке. Точнее, в тот момент, когда самолет касается земли. Это потому, что когда самолет находится на земле, он не может накрениться или повернуть, поэтому гироскоп выведет рули в какое-нибудь крайнее положение. А при отрыве самолета от земли (или сразу после посадки), когда модель имеет большую скорость, сильное отклонение рулей может сыграть злую шутку. Поэтому настоятельно рекомендуется использовать гироскоп на самолетах в стандартном режиме.
В самолетах эффективность рулей и элеронов пропорциональна квадрату скорости полета самолета. При широком диапазоне скоростей, что характерно для сложного пилотажа, необходимо компенсировать это изменение регулированием чувствительности гироскопа. Иначе при разгоне самолета система перейдет в автоколебательный режим. Если же задать сразу низкий уровень эффективности гироскопа, то на малых скоростях, когда он особенно нужен, от него не будет должного эффекта. На настоящих самолетах такое регулирование делает автоматика. Возможно, скоро так будет и на моделях. В некоторых случаях переход в автоколебательный режим органа управления полезен - при очень низких скоростях полета самолета. Многие наверное видели, как на МАКС-2001 "Беркут" С-37 показывал фигуру "харриер". Переднее горизонтальное оперение при этом работало в автоколебательном режиме. Гироскоп в канале крена позволяет делать самолет "несваливаемым на крыло". Подробнее о работе гироскопа в режиме стабилизации тангажа самолетов можно почитать в известной монографии И.В.Остославского "Аэродинамика самолета".
Заключение
В последние годы появилось много дешевых моделей миниатюрных гироскопов, позволяющих расширить сферу их применения. Простота инсталляции и низкие цены оправдывают использование гироскопов даже на учебных и радиобойцовых моделях. Прочность пьезоэлектрических гироскопов такова, что при аварии скорее испортится приемник или серво, чем гироскоп.
Вопрос о целесообразности насыщения летающих моделей современной авионикой каждый решает сам. На наш взгляд, в спортивных классах самолетов, - по крайней мере, на копиях, гироскопы все-таки со временем разрешат. Иначе невозможно обеспечить реалистичный, похожий на оригинал полет уменьшенной копии из-за разных чисел Рейнольдса. На хоббийных аппаратах применение искусственной стабилизации позволяет расширить диапазон погодных условий полетов, и летать в такой ветер, когда только ручное управление не в состоянии удержать модель.
Обсудить на форуме